To combine the flexibility of soft robotics and the portability and efficiency of traditional electrical actuation, I took part in designing and controlling this self-contained, lightweight, low cost and flexible origami robotic snake (OriSnake).
Note: Origami is the Japanese art of creating structures and objects by folding paper. Taking inspiration from this technique, we can create structures and mechanisms that are both flexible and light-weight.
OriSnake is constructed of four origami continuum modules that mounted in series and actuated via cables connected to electric motors. Each module has its own slave controller and passive wheels with a simple but effective suspension mechanism.
1.The individual module of the OriSnake
-
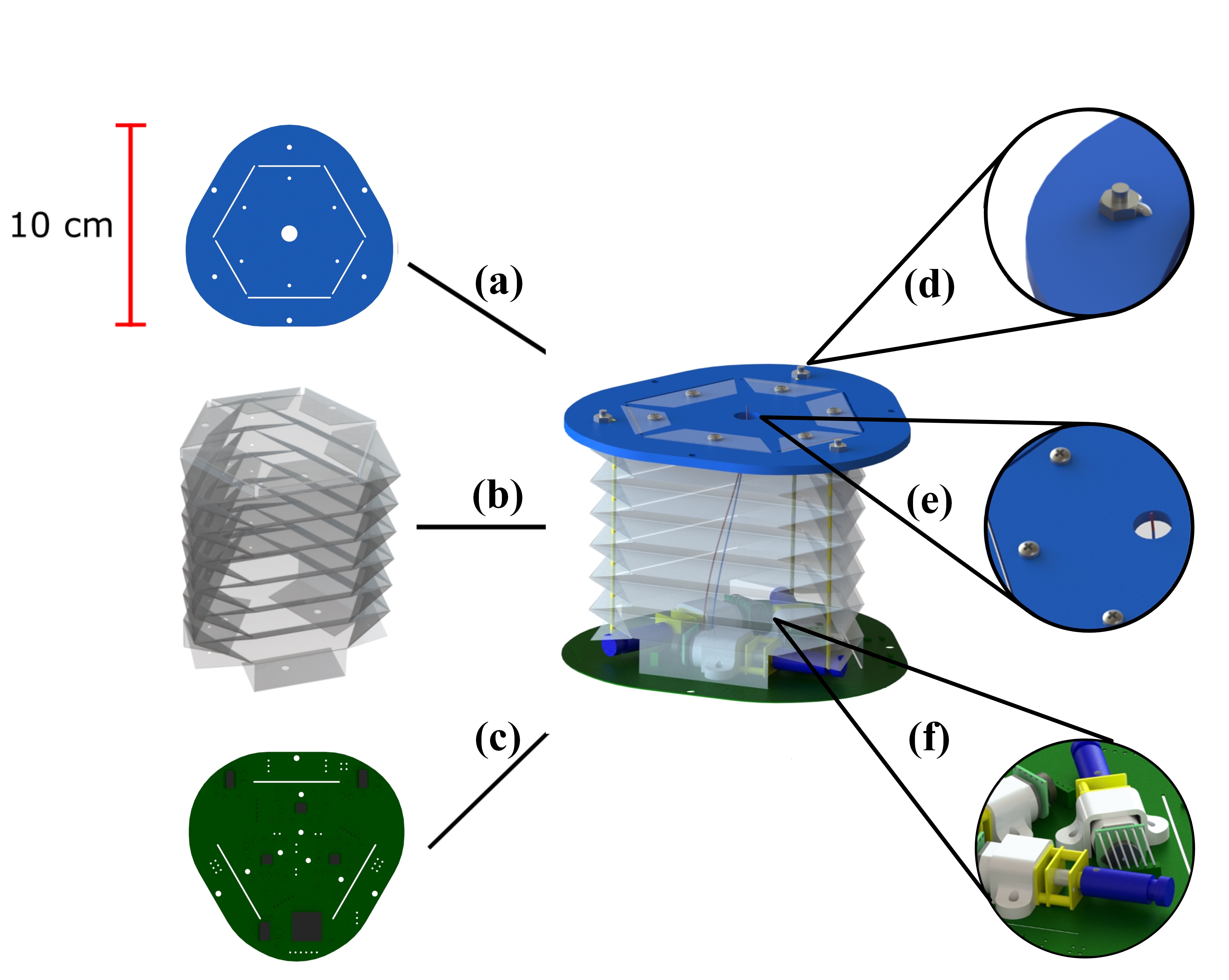
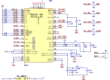
- Fig 1. Single Module (66mm long) with nylon fishing lines as cables. (a) Acrylic Plate (1/8” thick laser-cut, 52mm maximum radius), (b) 3-part origami bellows, (c) control board, (d) cable mounting screws, (e) bellows mounting screws, (f) 3 interior N20 gear DC motors mounts (gear ratio 1:150).
-

- Fig 2. Suspension System
2.System Architecture
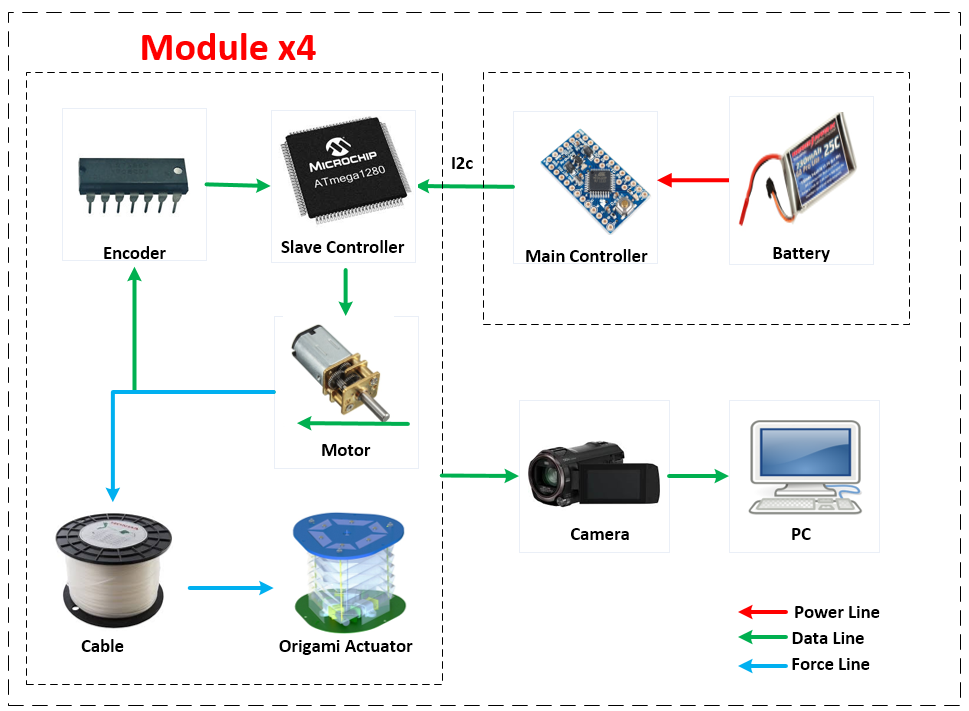
Fig 3. System Architecture
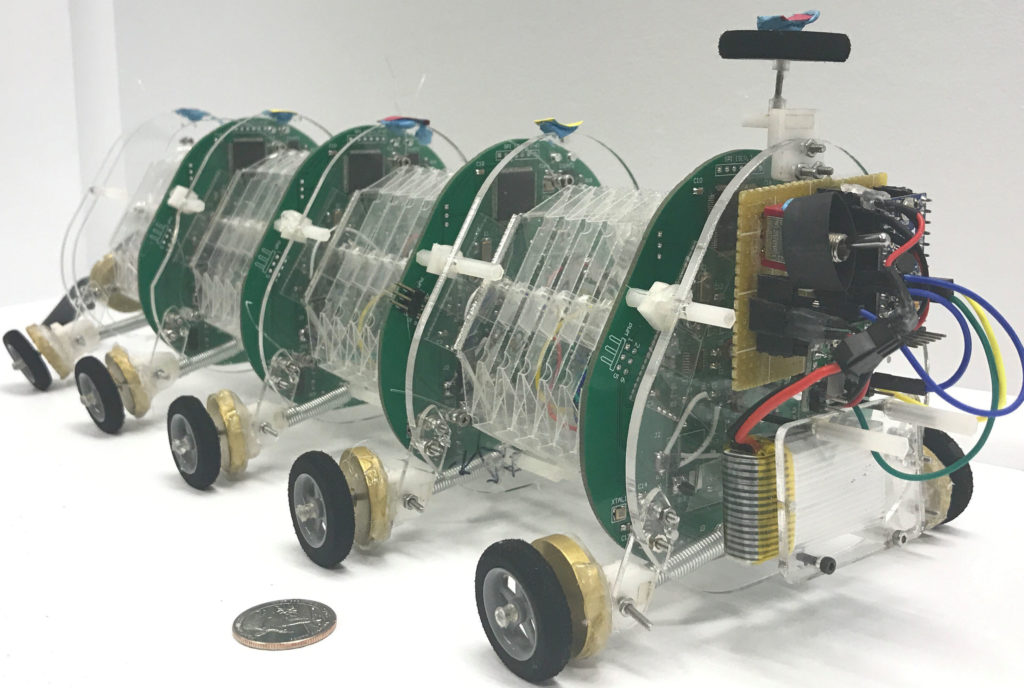
Fig 4. Snake Robot
3.Robot Performance
This video shows the locomotion methods of the OriSnake, an origami snake robot. It shows both serpentine and sidewinding locomotion, in particular allowing us to see the snake lift itself off the ground during sidewinding.
Paper: