Accomplished:
- 2-D soft robotic snake model and validate (already finished, paper submitted to 2019 ICRA)
- 2-D soft robotic snake motion planning (finished, submitted to IJRR journal)
Ongoing:
1. 3-D curvature sensor:making modules, prepare to make a chain and experiment, then write a paper.
2. SMA actuator chain: modules already fabricated, single module experiment already accomplished, designing PCB now and check whether the chain work.
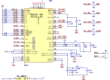
3. Impedance measurement: equipping a four-electrode impedance measurement system based on chip AD5933 with the force sensor in the lab on Kinova mechanical arm with a soft gripper to measure the freshness of the fruit.