This is my undergraduate thesis project guided by Prof. Feng (based on China NSF 61074015).
1.Main target :
Use a high-order sliding mode control strategy to control an induction motor servomechanism with a terminal sliding mode observer to see the parameters in real time and simulate to analyze its performance.
2.Controller:
First, build the induction motor mathematical model and do the transformation of coordinate, then design a PI controller based on the field-oriented control theory.
Second, design the second order sliding mode rotational speed controller and the 2-axis current controller.
Third, design the terminal sliding mode observer.
-
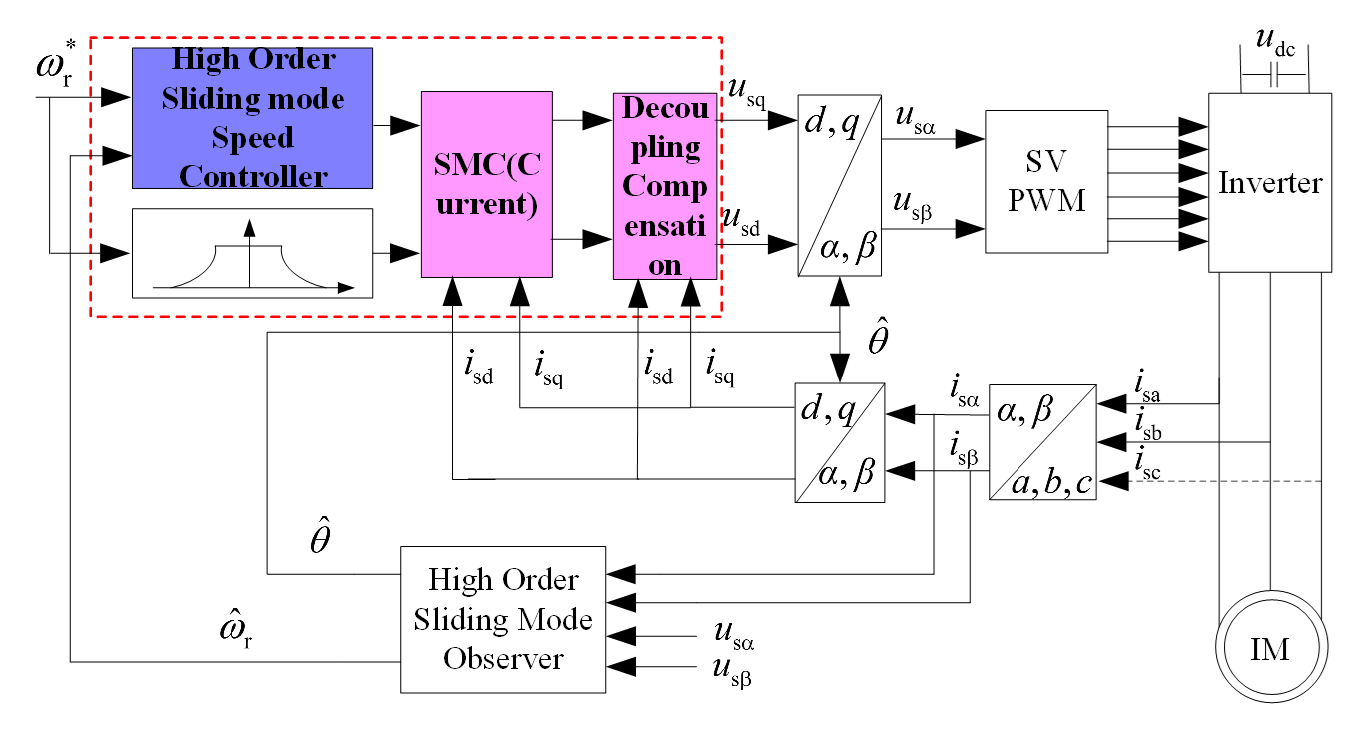
- Sliding Mode Control System Diagram of the Induction Motor Servomechanism
-

- TSM Observer Diagram
By using these controllers, the motor can reach the steady speed in a real quick time and is robust to the external disturbance.
By simulating in the MATLAB SIMULINK, I can see the frictional coefficient of viscosity, the moment of inertia, and the load torque in real time.