The project is based on WPI RBE 502 course ‘robot control’, the goal of this project is to realize the auto balance and trajectory tracking of an abstract bicycle. Given a trajectory of the pose (x, y, 𝜃) of the motorcycle, design a controller for inputs of the driving torque and steering angle to make it mimic the desirable trajectory. The controller should also bound the roll angle 𝜶 to 0 to keep the motorcycle balanced. This can be realized by 3 parts: building the dynamic model, proposing a controller, and verifying in a simulation environment.
I mainly responsible for the terminal sliding mode controller design and prove its Lyapunov stability.
The simulation result and how I design the controller can be seen in my github page, where I share the report and simulation files.
-
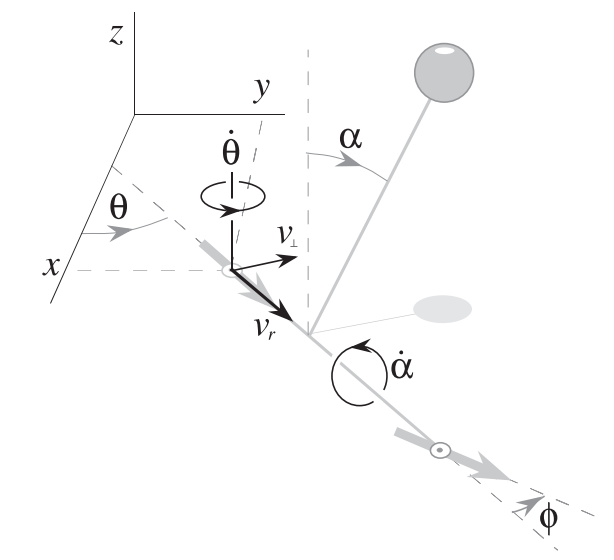
- bike model
-
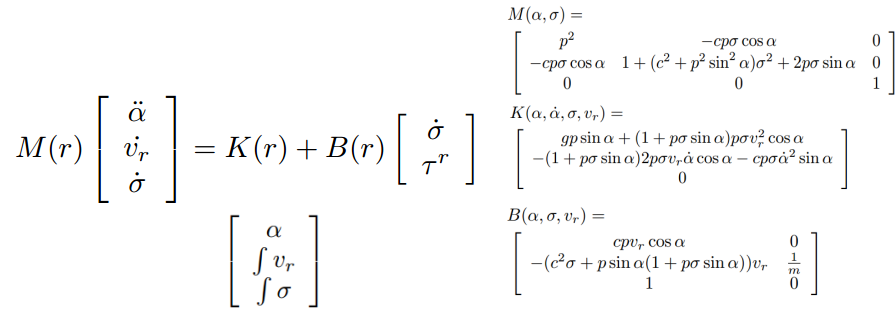
- dynamic model
-
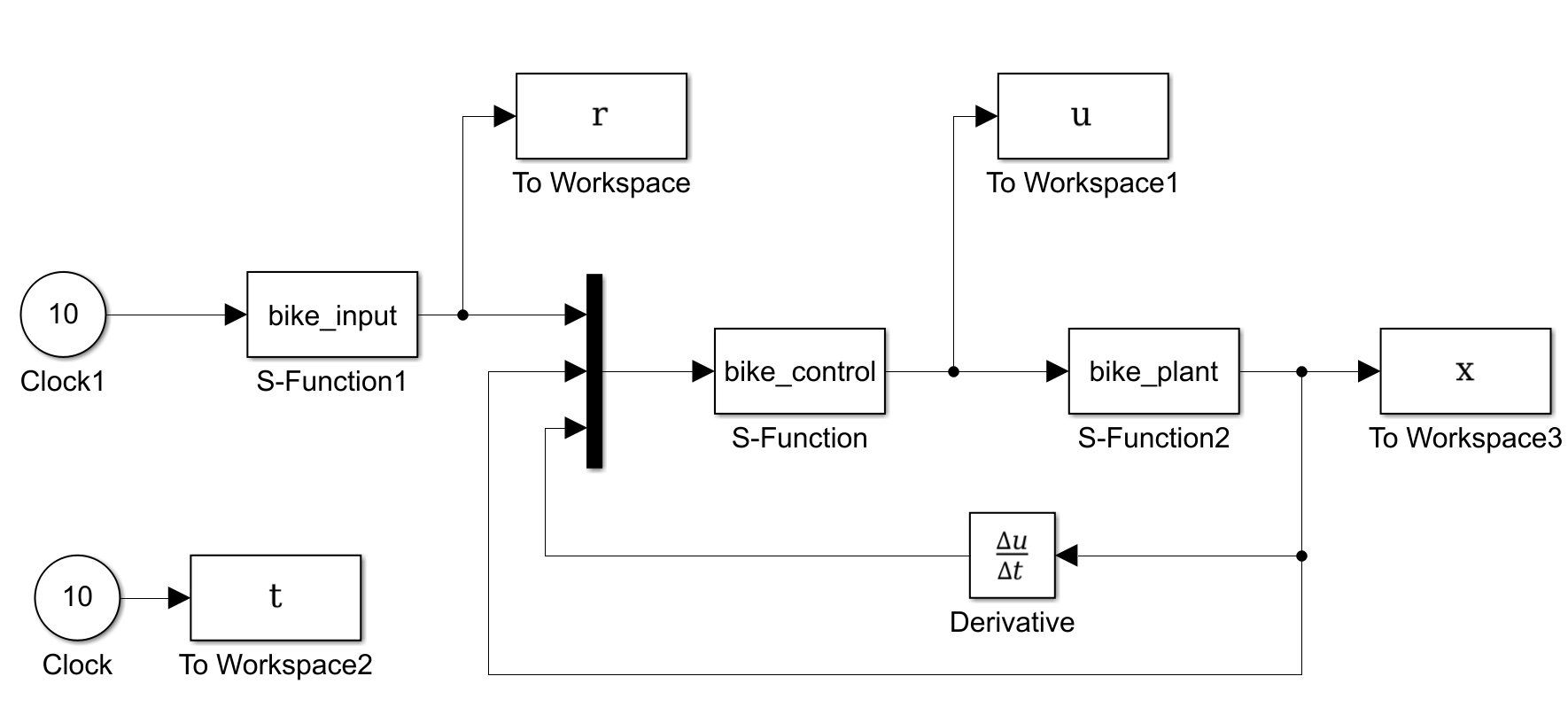
- simulink