Robots offer great promise in assisting search-and-rescue operations in extremely uncertain and cluttered environments after a variety of disasters. The simple structure of a snake robot has the capability to traverse complex, constrained, 3-D environments (small gaps, tough terrain).
Snake robots have been developed using traditional robotic structures composed of rigid links and discrete joints, though capable of snake-like motion, suffer from a number of problems. The fact that rigid snakes only articulate at discrete points mean that they can only approximate the smooth continuum body motions of biological snakes. To address this problem, I focused on developing soft pressure-operated robotic snakes.
Here is a modular soft robotic snake (SRS) (shown in Fig. 1) capable of three dimensional gaits, a so-called “3-D” Snake Robot. Each module of this snake is actuated using reverse Pneumatic Artificial Muscles (rPAMs) [1], which are tubes of silicone rubber wrapped in thread that extend when pressurized. With three rPAMs, each module has 3 bending degrees-of-freedom (DoF). This allows it to lift itself off the ground and perform sidewinding gaits for motion over more difficult terrain.

Fig 1. Soft Robotic Snake
- Design and Fabrication of Modules
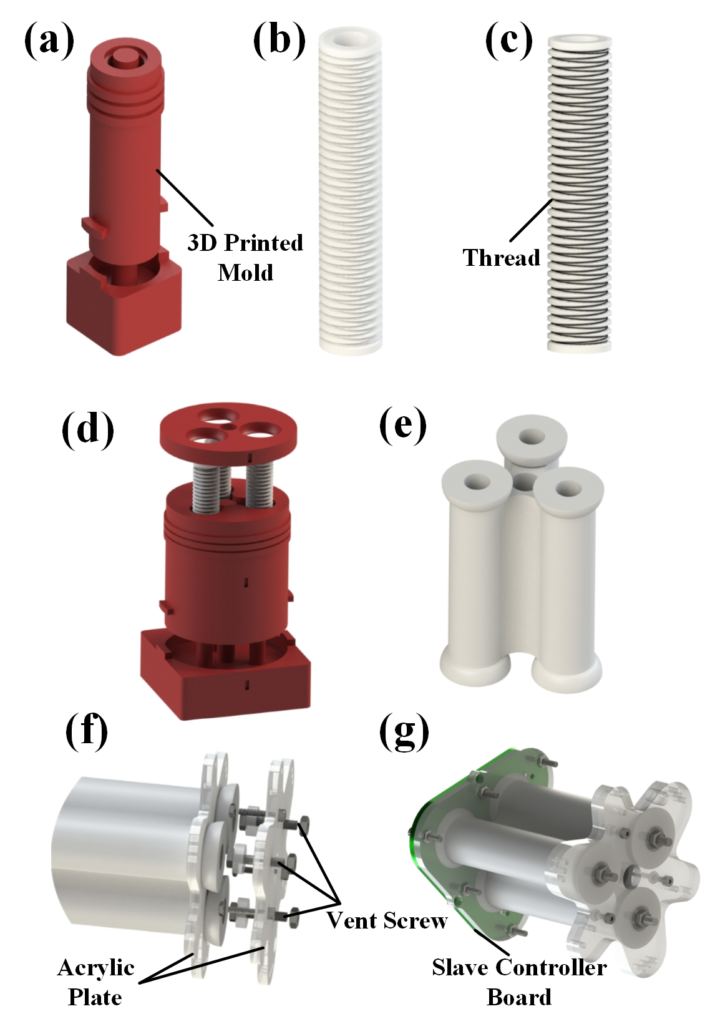
Fig 2. Fabrication of the Module
- Material Comparison and Mixture Experiments
Test the appearance of different silicone rubber: Ecoflex0030, Ecoflex0050, DraginSkin10 (from Smooth-On Inc.) on the module, and try to mix silicone in different proportion to get the material with specific features.
- Full System Composition
- Control Schemes (Locomotion)
Experiments are done on different surfaces (ground, carpet, grass) with different friction. For this snake, it has at least 3 kinds of locomotion, serpentine, sidewinding and climbing.
- Introduce of Ninjaflex shell
To increase the stiffness of the actuator to address the problem of buckling, in another paper the snake introduce a Ninjaflex shell.
Posters on SORO Conference:

Fig 3. Poster on SORO Conference
Paper
2. Wan, Zhenyu and Qin, Yun and Sun, Yinan and Luo, Ming and Skorina, Erik H. and Onal, Cagdas D. “Design, fabrication and experimental analysis of a 3-D soft robotic snake,” submitted to Soft Robotics Journal
This material is based upon work supported by the National Science Foundation under grant numbers IIS-1551219 and CMMI-1728412.
Reference:
[1]M. Luo, E. H. Skorina, W. Tao, F. Chen, and C. D. Onal, “Optimized design of a rigid kinematic module for antagonistic soft actuation,” in Technologies for Practical Robot Applications (TePRA), 2015 IEEE International Conference on, pp. 1–6, IEEE, 2015.