This is the main product of the startup in my undergraduate time(2013-2016).
I mainly responsible for the electrical part (including main controller design, modules&sensors development), help with the mechanical design and the software development.
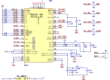
1.A version of control board schematic
-
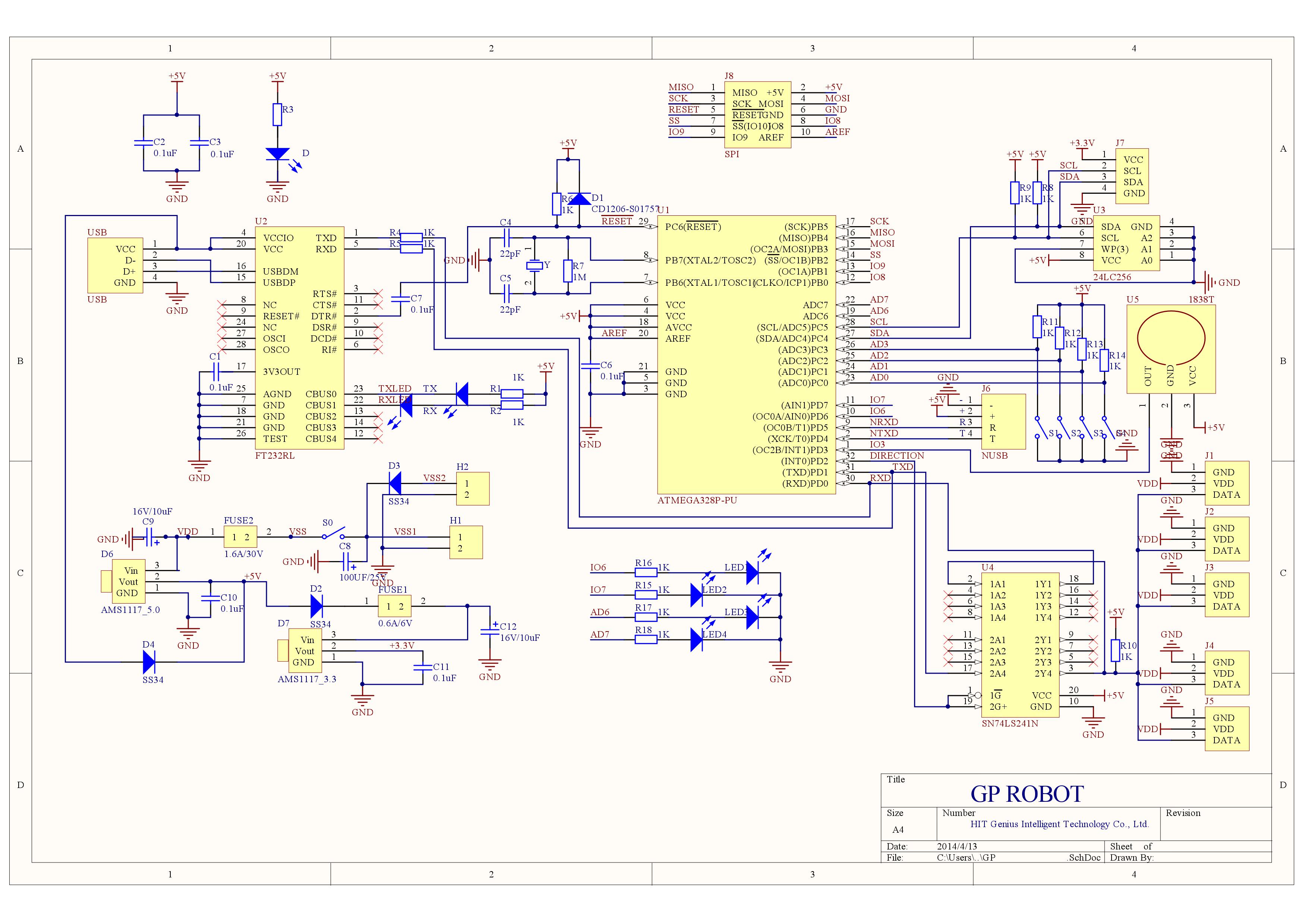
- GP Schematic
I had patents for utility models with others in servos and robot structure.
2.Some gait research
I did research on falling backward of the humanoid robot based on dynamic multi-objective optimization, by analyzing the stability of the zero moment point (ZMP) and seeing the robot as a four-level inverted pendulum, we built the falling backward dynamic model. I also researched its turning direction by seeing it as a second order inverted pendulum.
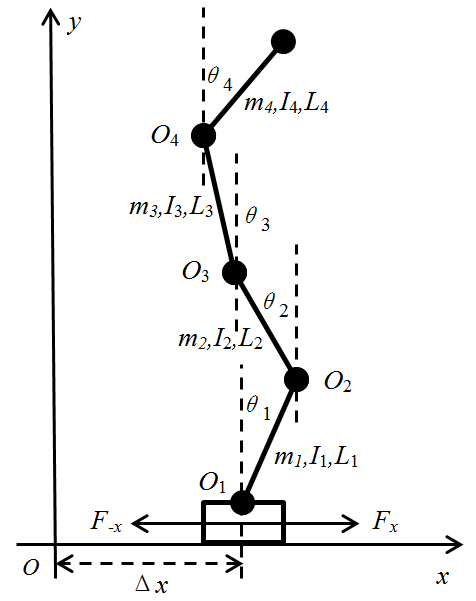
Fig. Four level inverted pendulum mapped to the humanoid robot
More details please follow Leju Robotics Co.Ltd. or feel free to contact me.
Patent:https://zwan-robotics.com/paper-patent/
Award
- China College Students Entrepreneurship Competition: 1st Place;
- the 1st “Lilac” Cup Innovation and Entrepreneurship Competition: 1st Place in Entrepreneurship Group;
- the 1st Ecovacs robot show:3rd Place.